Skanery 3D służą do przechwytywania informacji o geometrii całych powierzchni. W procesie digitalizacji zamieniają rzeczywiste obiekty w cyfrowe chmury punktów.
Skanery 3D, a właściwie Optyczne Maszyny Pomiarowe lub Optyczne Maszyny Współrzędnościowe, są to bezstykowe systemy metrologiczne służące do generowania precyzyjnych, trójwymiarowych, danych całych, nawet bardzo skomplikowanych powierzchni. W procesie skanowania 3D, inaczej digitalizacji 3D, zamieniają rzeczwiste geometrie obiektów na postać cyfrowego modelu, najczęściej zapisanego w postaci siatki trójkątów STL.
Skaner 3D ScanTech KSCAN
Skaner 3D ScanTech TrackSkan
Wśród skanerów 3D możemy wyróżnić dwa główne typy. Są to skanery światła strukturalnego oraz skanery laserowe. Mimo, iż światło lasera należy do zakresu fal elektromagnetycznych światła widzialnego, to oddziela się je od skanerów światła strukturalnego, ponieważ wykorzystują inny sposób projekcji i akwizycji danych pomiarowych.
Co więcej, obecnie najnowocześniejsze laserowe skanery 3D, jak chociażby ScanTech KSCAN Magic, oferują możliwość pomiaru podczerwienią, która wychodzi poza zakres widzialny przez ludzkie oko.
Ogólna zasada działania bezstykowych maszyn współrzędnościowych odbywa się dzięki wykorzystaniu efektu zniekształceń prążków Moire’a. Polega ona na oświetleniu powierzchni obiektu rastrem linii o znanej gęstości, które ulegają zniekształceniu zgodnym z geometrią mierzonego obiektu. Następnie, wykorzystując precyzyjne kamery, przechwytuje się informacje o pixelach, które powstają na granicy przeskoku stopni szarości między prążkiem, a powierzchnią części. Tak pozyskane współrzędne zapisywane są w postaci cyfrowej chmury punktów.
Prążki Moiré powstałe na skutek interferencji linii
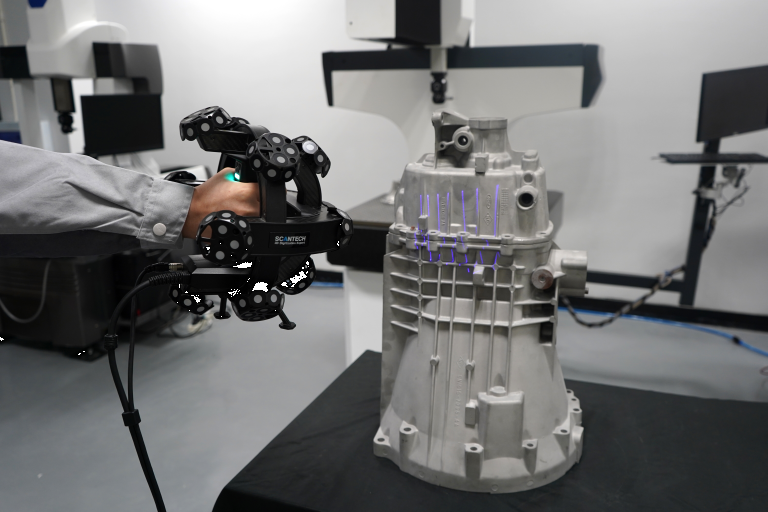
Rastr linii generowanych przez ręczny skaner laserowy ScanTech KSCAN MAGIC
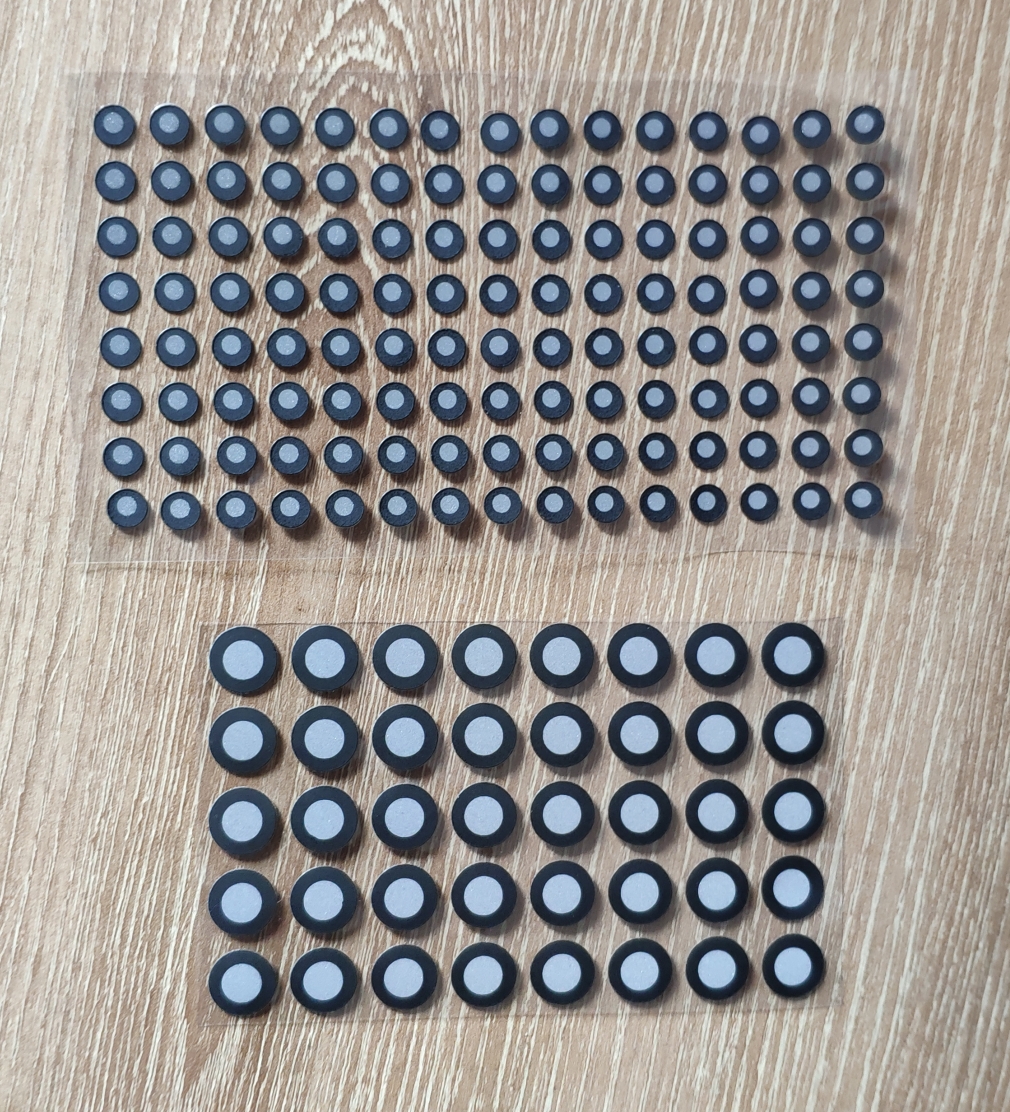
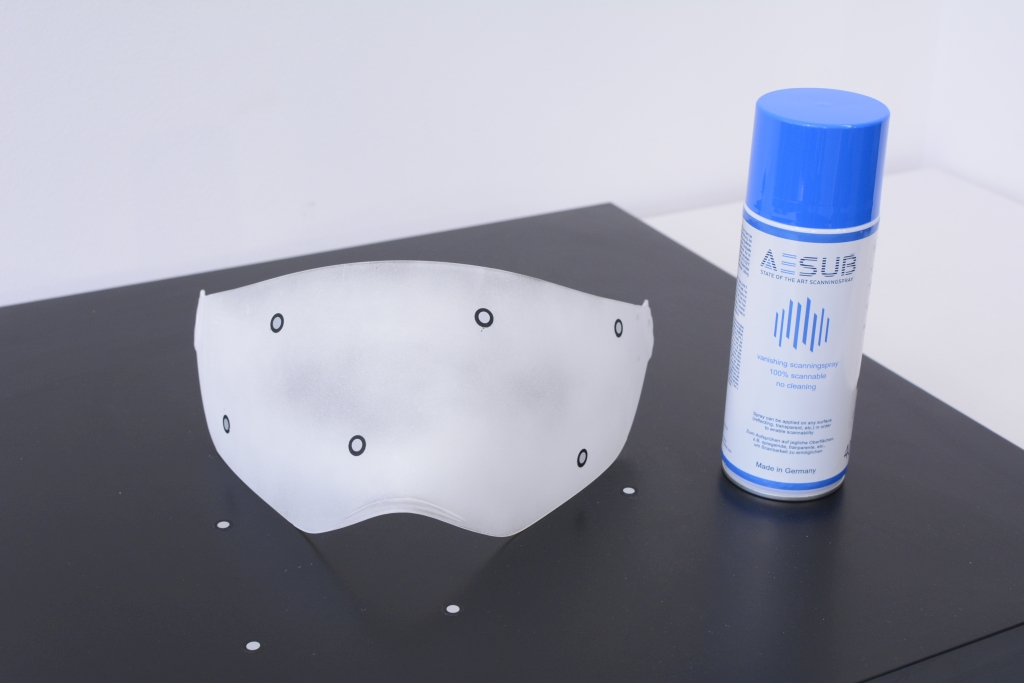
Do stworzenia precyzyjnej chmury punktów stosuje się punkty referencyjne. Są to rozklejane bezpośrednio na części lub dookoła niej, np. na ramce referencyjnej lub uchwycie, markery, dzięki którym system orientuje się w przestrzeni i wie w jaki sposób umiejscowić dane pomiarowe w globalnym układzie współrzędnych.
Niektóre systemy, jak np. ScanTech TrackScan, wykorzystują zewnętrzne urządzenie śledzące, dzięki czemu pomiar odbywa się bez punktów referencyjnych, z zachowaniem wysokiej dokładności.
Mniej precyzyjne systemy łączą pojedyncze skany wykorzystując cechy geometryczne mierzonego detalu.
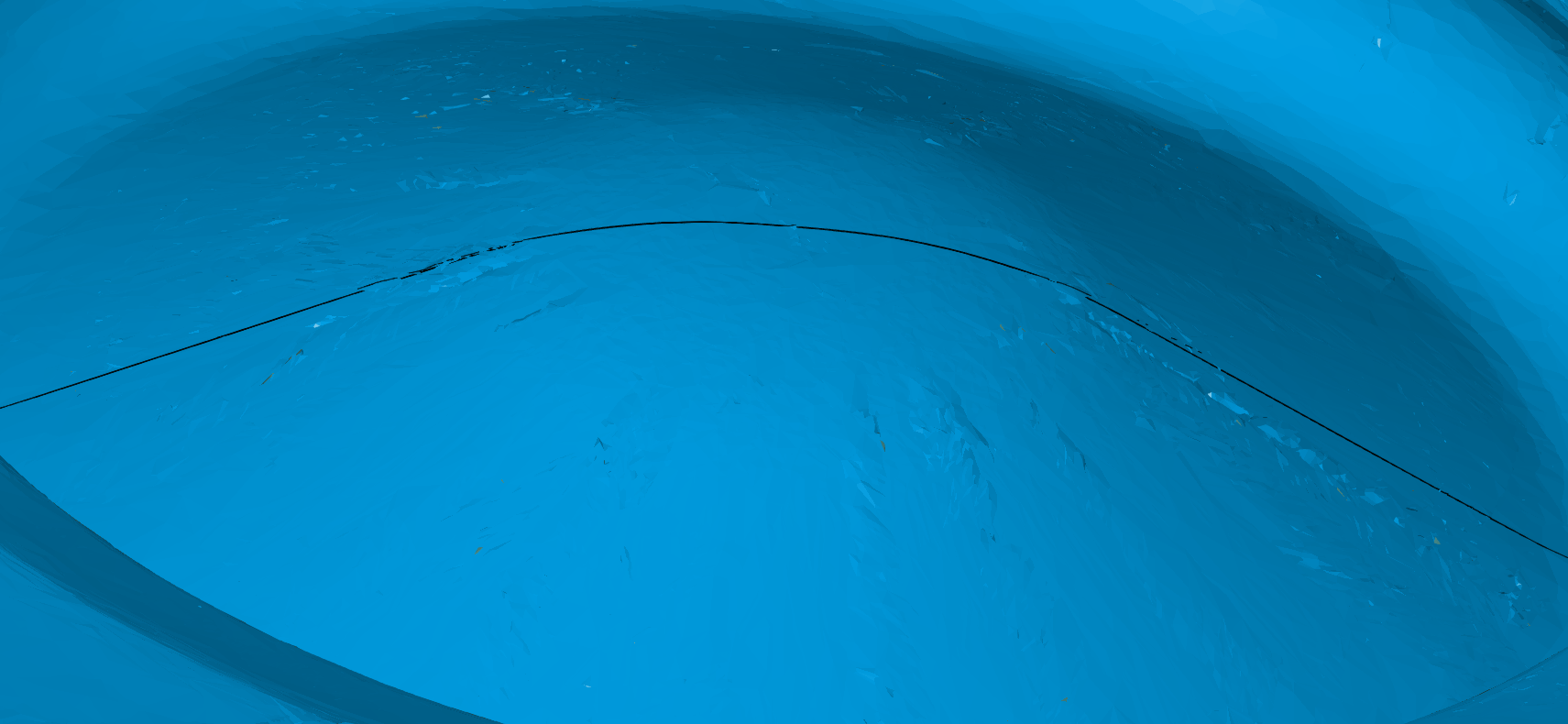
Chmura punktów nie jest jednak ostatecznym wynikiem procesu skanowania 3D. Są to tylko surowe informacje o wszystkich współrzędnych, jakie przechwycił system pomiarowy. W procesie digitalizacji, czyli skanowania 3D, wiele pojedynczych współrzędnych nakłada się na siebie. Z uwagi na fakt, iż na dokładność skanera 3D, ma wpływ wiele trudnych do opisania czynników zewnętrznych, jak np.: zmiany temperatury, zewnętrzne źródła światła, czy odblaski; to informacje o tej samej powierzchni mogą być zapisane przez wiele punktów, które mogą mieć różne pozycje, jednak najczęściej nieprzekraczające dokładności głowicy pomiarowej. Wynika to z konieczności przesuwania skanera 3D wzdłuż całej geometrii mierzonego obiektu w taki sposób, żeby system zawsze widział co najmniej 3 punkty referencyjne wspólne, łączące poprzedni pomiar z nowym. Często także, przy pomiarze skomplikowanych geometrii lub małych detali, wymagane są różne ustawienia głowicy, które powodują, że te same obszary są mierzone wielokrotnie. Aby osiągnąć jednolite i precyzyjne informacje opisujące zmierzony detal, współczesne programy do akwizycji danych stosują postprocessing, często nazywany poligonizacją, w którym algorytm, wykorzystując metodę najmniejszych kwadratów i rozkład Gaussa, uśrednia wygenerowane współrzędne chmury punktów, tworząc dokładną siatkę trójkątów zapisywaną pod postacią pliku STL.
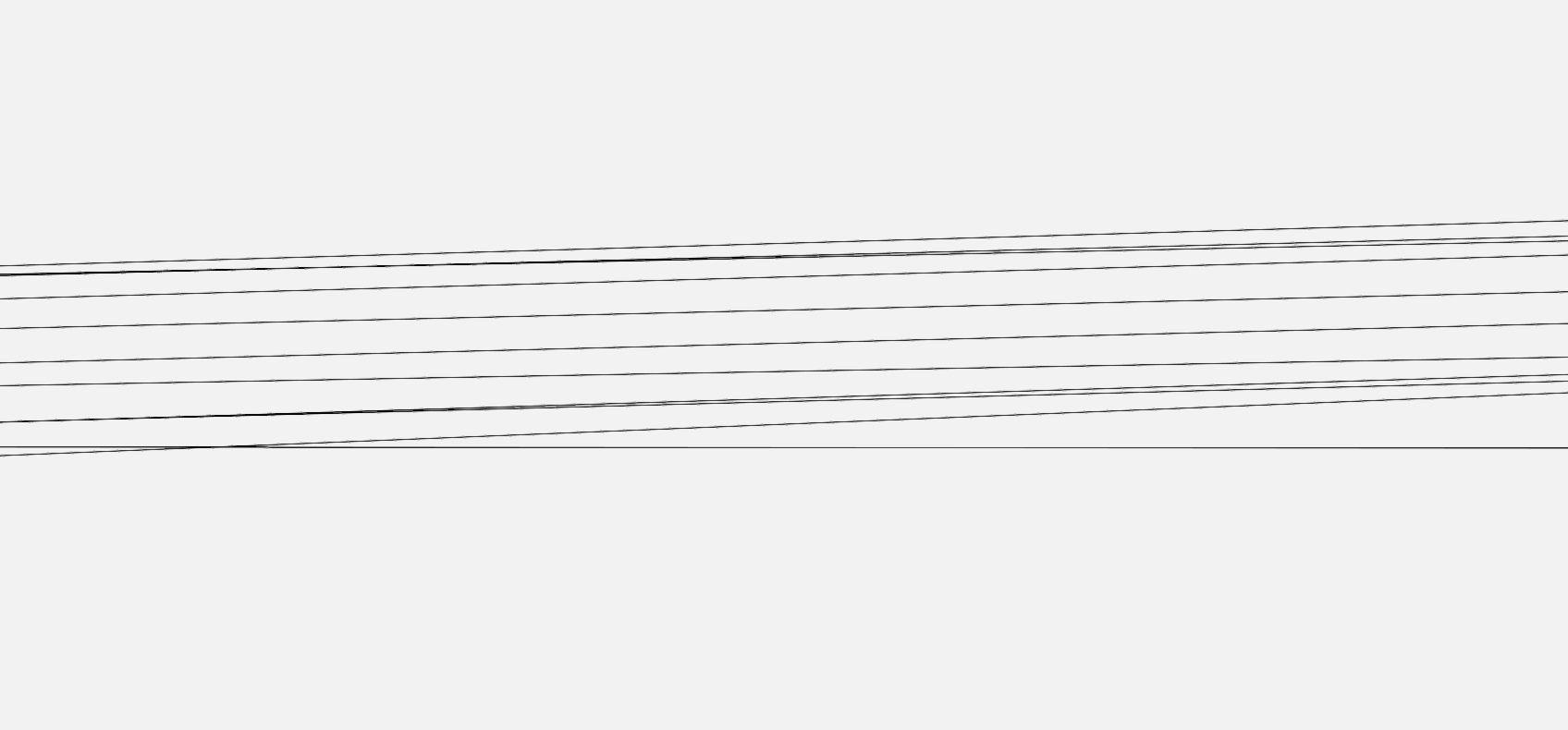
Chmura punktów, surowe i nieobrobione dane pomiarowe, z zaznacoznym na czarno przekrojem
Przekrój przez niespoligonizowaną chmurę punktów
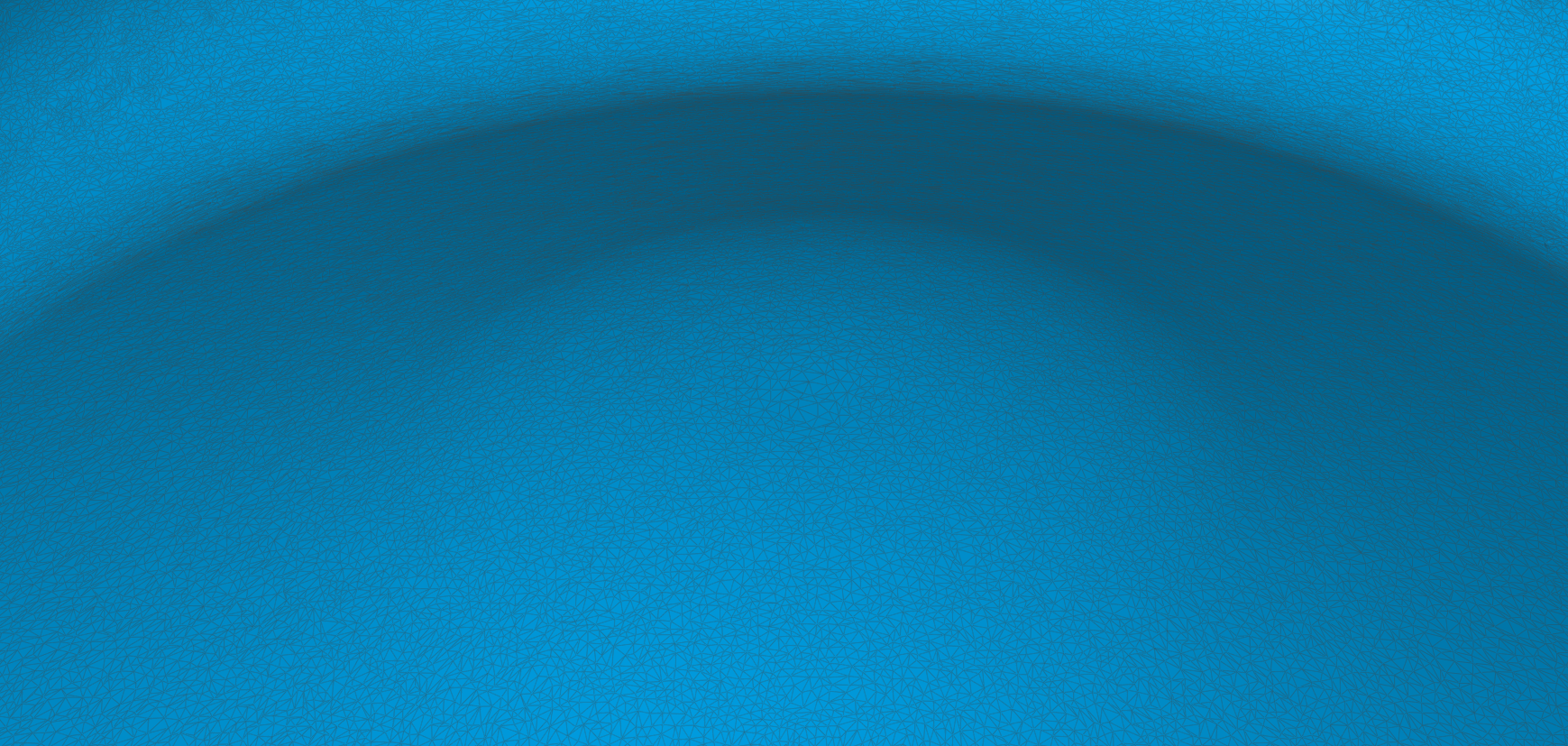
Precyzyjna siatka trojkatow STL
Już teraz zachęcamy do obserwowania naszej strony, ponieważ w następnej części poradnika skupimy się na szczegółowej zasadzie działania skanerów 3D światła strukturalnego i laserowych.